
Data communication is defined as exchange of data between two devices via some form of transmission media such as a cable, wire or it can be air or vacuum also.
- There are five components of a data communication system:
- Message
- Sender
- Receiver
- Transmission Medium
- Set of rules (Protocol)

Why Data Communication?
The fundamental purpose of data communication is to
exchange information which is done by following certain rules
and regulations called protocols and standards.
- Communications between devices are justified for the following reasons:
- Reduces time and effort required to perform business task
- Captures business data at its source
- Centralizes control over business data
- Effect rapid dissemination of information
- Reduces current and future cost of doing business
- Supports expansion of business capacity at reasonably incremental cost as the organization
- Supports organizations objective in centralizing computer system
- Supports improved management control of an organization.
Analog and Digital Signal:
The term analog signal refers to signal that is
continuous and takes continuous value. Most phenomenons
in the world today are analog.
A digital signal is a physical signal that is a representation of
a sequence of discrete values. The signal must have a finite
set of possible values, the number of set which can be
anywhere between two and very large number that is not
infinity. Digital signal is one of two voltage value (0V or 5V)
timing graphs of these signals look like square waves
Representation of data and its flow Networks
Data Representation:
Data representation is defined as the methods used to represent information in computers. Different types of data can be stored in the computer system. This includes numeric
data, text, executable files, images, audio, video, etc. all these will look different to us as human. However, all types of information or data stored in the computer are represented
as a sequence of 0s and 1s.
Decimal Numbers:
As human we are used to writing numbers using digits 0 to 9.This is called base 10. This number system has been widely adopted, in large part because we have 10 fingers. However,
other number systems still persist in modern society.
Binary Numbers:
Any positive integer (whole number) can be represented by a sequence of 0s and 1s. Numbers in this form are said to be in base two, and are called binary numbers. Computers are based on the binary (base 2) number system because electrical wire can only be of two states (on or off).
Hexadecimal Numbers:
Writing numbers in binary is tedious since this representation uses between 3 to 4 times as many digits as the decimal representation. The hexadecimal (base 16) number system is
often used as shorthand for binary. Base 16 is useful because16 is a power of 2, and numbers have roughly as many digits as in the corresponding decimal representation. Another name for hexadecimal numbers is alpha decimal because the numbers are written from 0 to 9 and A to F. where A is 10, B is11 up to F that is 15.
Text:
American Standard Code for Information Interchange (ASCII code) defines 128 different symbols. The symbols are all the characters found on a standard keyboard, plus a few extra.
Unique numeric code (0 to 127) is assigned to each character. In ASCII, “A” is 65, “B” is 66, “a” is 97, “b” is 98, and so forth. When a file is save as “plain text”, it is stored using ASCII. ASCII format uses 1 byte per character 1 byte gives only 256 (128 standard and 128 non-standard) possible characters. The code value for any character can be converter to base 2, so any written message made up of ASCII characters can be converted to a string of 0s and 1s.
Graphics:
Graphics on computer screen are consists of pixels. The pixels are tiny dots of color that collectively paint a graphic image on a computer screen. It is physical point in a raster
image, or the smallest addressable element in an all points addressable display device. Hence it is the smallest controllable element of a picture represented on the screen.
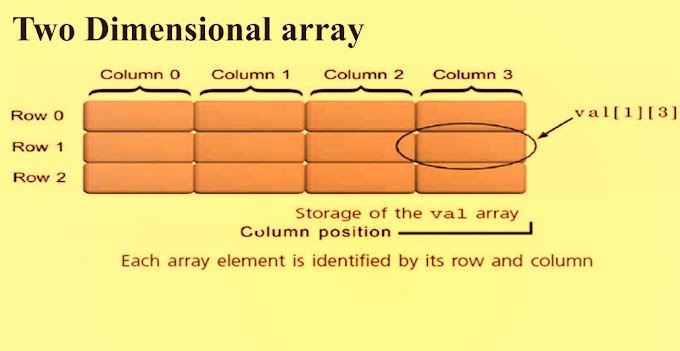
The address of a pixel corresponds to its physical coordinates. LCD pixels are manufactured in two-dimensional grid, and are often represented using dots or squares, but CRT pixels correspond to their timing mechanism and sweep rates. The pixels are organized into many rows and columns on the screen.
Data flow:
A data flow diagram shows how data is processed within a system based on inputs and outputs. Visual symbols are used to represent the flow of information, data sources and destinations, and where data is stored.
Basic Components of data communication are:
1. Source: It is
the transmitter of data.
- Examples : Terminal, Computer, Mainframe etc.
2. Medium: The communications stream through which the data is being transmitted.
- Examples : Cabling, Microwave, Fiber optics, Radio Frequencies (RF), Infrared Wireless etc.
3.Receiver: The receiver of the data transmitted.
- Examples : Printer, Terminal, Mainframe, and Computer.
Source:
- The source generates the information or data that will be transmitted to the destination.
- Popular forms of information include text, numbers, pictures, audio, video or a combination 18 of any of these.
- Information are put together in analog or digital form and broken into group or segment of data called packets.
- Each packet consists of the following:
- The actual data being sent
- Header
- Information about the type of data
- Where the data came from
- Where it is going, and
- How it should be reassembled so the message is clear and in order when it arrives at the destination
Transmitter:
- The transmitter a device used to convert the data as per the destination requirement.
- Example: A modem, converts the analog (telephonic) signal to digital (computer) signals and alternatively digital to analog.
Transmission medium:
The transmission medium is the physical path by which data
travels from transmitter to receiver.
Example of such
channels is copper wires, optical fibers and wireless
communication channels etc.
Receiver:
This receives the signals from the transmission medium and
converts it into a form that is suitable to the destination
device.
Example: A modem accepts analog signal from a
transmission channel and transforms it into digital bit stream
which is acceptable by computer system.
Destination:
It is simply a device for which source device sends the data.
Various connection topology:
Network Topology defines the structure of the network of how all the components are interconnected to each other.
- There are five types of topology:
- Bus
- Star
- Ring
- Mesh
- Hybrid
Bus Topology
The Bus topology consists of a single cable that runs to every
work-station. The bus topology is also known
as linear bus. In other words, all the nodes (computers and
servers) are connected to the single cable (called bus), by the
help of interface connectors. This central cable is the back
bone of the network and every workstation communicates
with the other device through this bus. Bus Topology
Computers on a bus topology network communicate by
addressing data to a particular computer and putting that
data on the cable in the form of electronic signals.
Advantages of Linear Bus Topology:
- It is easy to set-up and extend bus network.
- Cable length required for this topology is the least compared to other networks.
- Bus topology very cheap.
- Linear Bus network is mostly used in small networks.
Disadvantages of Linear Bus Topology:
- There is a limit on central cable length and number of nodes that can be connected.
- Dependency on central cable in this topology has its disadvantages. If the main cable (i.e. bus) encounters some problem, whole network breaks down.
- Proper termination is required to dump signals. Use of terminators is must.
- It is difficult to detect and troubleshoot fault at individual station.
- Maintenance costs can get higher with time.
- Efficiency of Bus network reduces, as the number of devices connected to it increases.
- It is not suitable for networks with heavy traffic.
- Security is very low because all the computers receive the sent signal from the source.
Ring Topology
The ring topology connects computers on a single circle of cable. There are no terminated ends. A ring topology connects one host to the next and the last host to the first. The signal travels around the loop in one direction and pass
through each computer. Unlike the passive bus topology, each computer acts like a repeater to boost the signal and send it on to the next computer. Because the signal passes through each computer, the failure of one computer can impact the entire network.
One method of transmitting data around a ring is called token passing. The token is passed from computer to computer until it gets to a computer that has data to send. The sending computer modifies the token, puts an electronic address on the data, and sends it around the ring.
Advantages of Ring Topology:
- This type of network topology is very organized. Each node gets to send the data when it receives an empty token. This helps to reduces chances of collision. Also in ring topology all the traffic flows in only one direction at very high speed.
- Even when the load on the network increases, its performance is better than that of Bus topology.
- There is no need for network server to control the connectivity between workstations.
- Additional components do not affect the performance of network.
- Each computer has equal access to resources.
Disadvantages of Ring Topology:
- Each packet of data must pass through all the computers between source and destination. This makes it slower than Star topology.
- If one workstation or port goes down, the entire network gets affected.
- Network is highly dependent on the wire which connects different components.
- MAU‟s and network cards are expensive as compared to Ethernet cards and hubs.
Star Topology
In the star topology, computers are connected by cable segments to centralized component, called a hub or switch. Signals are transmitted from the sending computer through the hub or switch to all computers on the network. This topology originated in the early days of computing with computers connected to a centralized mainframe computer. It is now a common topology in microcomputer networking.
Each device has a dedicated point-to-point link only to a central controller, usually called a hub. The devices are not directly linked to one another. Unlike a mesh topology, a star topology does not allow direct traffic between devices. The controller acts as an exchange: If one device wants to send data to another, it sends the data to the controller, which then relays the data to the other connected device.
The star network offers centralized resources and management. However, because each computer is connected to a central point, this topology requires a great deal of cable in a large network installation. Also, if the central point fails, the entire network goes down.
Advantages of Star Topology:
- As compared to Bus topology it gives far much better performance, signals don't necessarily get transmitted to all the workstations. A sent signal reaches the intended destination after passing through no more than 3-4 devices and 2-3 links. Performance of the network is dependent on the capacity of central hub.
- Easy to connect new nodes or devices. In star topology new nodes can be added easily without affecting rest of the network. Similarly components can also be removed easily.
- Centralized management. It helps in monitoring the network.
- Failure of one node or link doesn't affect the rest of network. At the same time it is easy to detect the failure and troubleshoot it.
Disadvantages of Star Topology:
- Too much dependency on central device has its own drawbacks. If it fails whole network goes down.
- The use of hub, a router or a switch as central device increases the overall cost of the network.
- Performance and as well number of nodes which can be added in such topology is depended on capacity of central device.
Mesh Topology
In a mesh topology, every device has a dedicated point-topoint link to every other device. The term dedicated means that the link carries traffic only between the two devices it connects. In a mesh topology, Node1 must be connected to n1 nodes, node2 must be connected to (n – 1) nodes, and finally node n must be connected to (n – 1) nodes. We need n (n - 1) physical links. In other words, we can say that in a
mesh topology, we need n (n 1) / 2 .
To accommodate many links, every device on the network must have (n – 1) input/output (I/O) ports to be connected to the (n – 1) stations as shown in Figure above. For these reasons a mesh topology is usually implemented in a limited
fashion, as a backbone connecting the main computers of a hybrid network that can include several other topologies. One practical example of a mesh topology is the connection of telephone regional offices in which each regional office needs
to be connected to every other regional office.
Advantages of Mesh topology:
- Data can be transmitted from different devices simultaneously. This topology can withstand high traffic.
- Even if one of the components fails there is always an alternative present. So data transfer doesn't get affected.
- Expansion and modification in topology can be done without disrupting other nodes.
Disadvantages of Mesh topology:
- There are high chances of redundancy in many of the network connections.
- Overall cost of this network is way too high as compared to other network topologies.
- Set-up and maintenance of this topology is very difficult. Even administration of the network is tough.
Hybrid Topology
Hybrid, as the name suggests, is mixture of two different things. Similarly in this type of topology we integrate two or more different topologies to form a resultant topology which has good points (as well as weaknesses) of all the constituent basic topologies rather than having characteristics of one specific topology. This combination of topologies is done according to the
requirements of the organization.
For example, if there is an existing ring topology in one office department while a bus topology in another department, connecting these two will result in Hybrid topology. Remember connecting two similar topologies cannot be termed as Hybrid topology. Star-Ring and Star-Bus networks are most common examples of hybrid network.
Advantages of Hybrid Network Topology:
- Reliable: Unlike other networks, fault detection and troubleshooting is easy in this type of topology. The part in which fault is detected can be isolated from the rest of network and required corrective measures can be taken, WITHOUT affecting the functioning of rest of the network.
- Scalable: It's easy to increase the size of network by adding new components, without disturbing existing architecture.
- Flexible: Hybrid Network can be designed according to the requirements of the organization and by optimizing the available resources. Special care can be given to nodes where traffic is high as well as where chances of fault are high.
- Effective: Hybrid topology is the combination of two or more topologies, so we can design it in such a way that strengths of constituent topologies are maximized while there weaknesses are neutralized. For example we saw Ring Topology has good data reliability (achieved by use of tokens) and Star topology has high tolerance capability (as each node is not directly connected to other but through central device), so these two can be used effectively in hybrid star-ring topology.
Disadvantages of Hybrid Topology:
- Complexity of Design: One of the biggest drawbacks of hybrid topology is its design. It is not easy to design this type of architecture and it‟s a tough job for designers. Configuration and installation process needs to be very efficient.
- Costly Hub: The hubs used to connect two distinct networks, are very expensive. These hubs are different from usual hubs as they need to be intelligent enough to work with different architectures and should be function even if a part of network is down.
- Costly Infrastructure: As hybrid architectures are usually larger in scale, they require a lot of cables; cooling systems, sophisticate network devices, etc.
Protocol and Standards In Networking
A protocol is a set of rules that govern data communications.
It defines what is communicated, how it is communicated, and
when it is communicated. The key elements of a protocol are
syntax, semantics, and timing.
- Syntax: The term syntax refers to the structure or format of the data, meaning the order in which they are 27 presented.
- For example, a simple protocol might expect the first 8 bits of data to be the address of the sender, the second 8 bits to be the address of the receiver, and the rest of the stream to be the message itself.
- Semantics: The word semantics refers to the meaning of each section of bits. How is a particular pattern to be interpreted, and what action is to be taken based on that interpretation?
- For example, does an address identify the route to be taken or the final destination of the message?
- Timing: The term timing refers to two characteristics: when data should be sent and how fast they can be sent.
- For example, if a sender produces data at 100 Mbps but the receiver can process data at only 1 Mbps, the transmission will overload the receiver and some data will be lost.
Standards are essential in creating and maintaining an open
and competitive market for equipment manufacturers and in
guaranteeing national and international interoperability of
data and telecommunications technology and processes.
Standards provide guidelines to manufacturers, vendors,
government agencies, and other service providers to ensure
the kind of interconnectivity necessary in today's
marketplace and in international communications.
Data communication standards fall into two categories: de
facto and de jure:
- De facto: Standards that have not been approved by an organized body but have been adopted as standards through widespread use are de facto standards.
- De facto standards are often established originally by manufacturers who seek to define the functionality of a new product or technology.
- De jure: Those standards that have been legislated by an officially recognized body are de jure standards







{kind=link}
0 Comments